 Лаборатория нестандартного оборудования
Лаборатория нестандартного оборудования Программно-аппаратный модуль анализа ПЭТ-бутылок для сортировки
Технологии анализа данных всё стремительнее входят в нашу жизнь, они могут дать еще один шанс решению действительно важных для людей социальных задач, которые ранее не были реализованы. Основная причина важности переработки ПЭТ-сырья – положительное влияние на экологию. Одна пластиковая бутылка будет разлагаться около 300 лет. С каждым годом появляется все больше отходов пластика, которые постепенно загрязняют окружающий мир. Решения для анализа изображений становятся все более востребованными. Это связано с распространением устройств с качественными сенсорами.
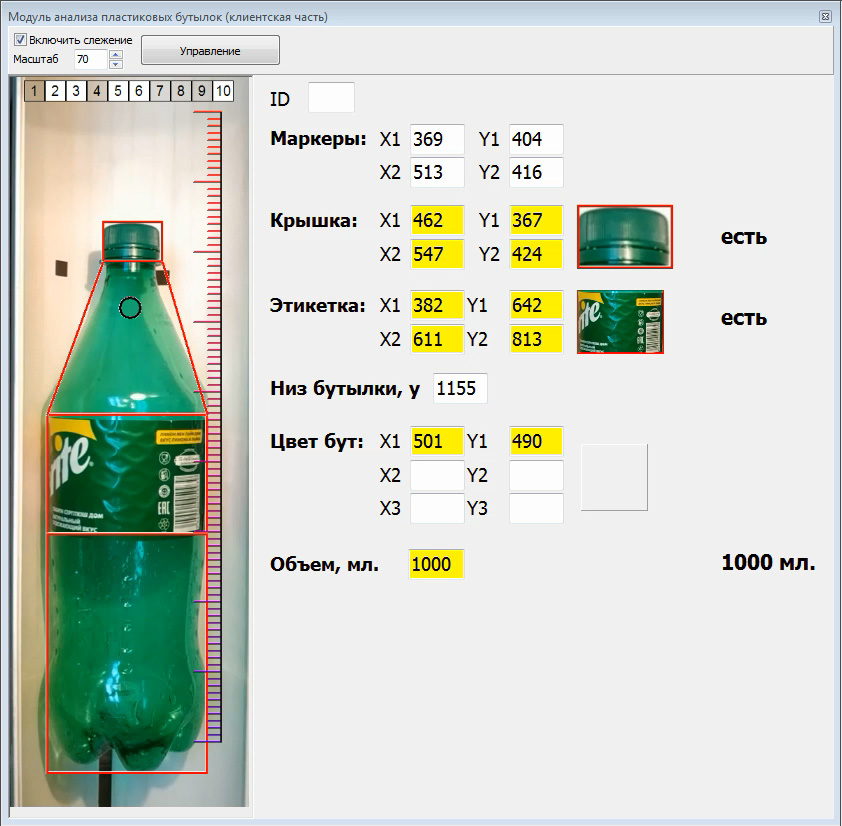
Для модуля сортировки ПЭТ-бутылок был разработан программно-аппаратный анализ параметров бутылки. В результате было создано программное обеспечение, которое преобразует изображение, снятое на камеру, в параметры: цвет, объем бутылки, наличие этикетки и крышки.
Несмотря на кажущуюся простоту задачи, она осложняется рядом моментов:
- большую часть времени бутылка находится в движении, при этом анализ ее изображения затруднителен, так как изображение смазано
- при остановке бутылка не всегда ложится прямо
Из позитивных моментов — размер и форма бутылок достаточно стандартизированы и распознавание их частей может быть алгоритмизировано и запрограммировано.
Общая архитектура решения
В целом, задачу распознавания кадра можно разбить на следующие этапы:
- Предварительная обработка кадра с целью нормализации яркости/контраста
- Выделение границ верхней и нижней частей бутылки
- Распознавание алгоритмически местонахождения крышки, ее наличия
- Определение местонахождения этикетки, ее наличия
- Разбиение бутылки на сегменты, исправление геометрических перспективных искажений
- Определение ключевых точек цвета пластика
- Определение высоты бутылки и ее объема
Производительность модуля на данный момент – в среднем 0,95 сек на 1 бутылку.
Технические подробности
Для предобработки изображений были использованы функции выделения цветового диапазона, для нахождения ключевых точек цвета пластика – функции усреднения оттенка внутри маркера. Получив множество ключевых точек и отбросив второстепенные и не входящие в габариты бутылки, функция рассматривает задачу как классическую задачу классификации для компьютерного зрения. В этом случае изображение разбивается на сегменты, после чего полученные координаты используются для решения задачи алгоритмически.